ผู้จัดจำหน่ายอุปกรณ์ทดสอบ
 ISO9001: ได้รับการรับรองปี 2015 ISO9001: ได้รับการรับรองปี 2015
ISO9001: ได้รับการรับรองปี 2015 ISO9001: ได้รับการรับรองปี 2015 ไทย
ไทย


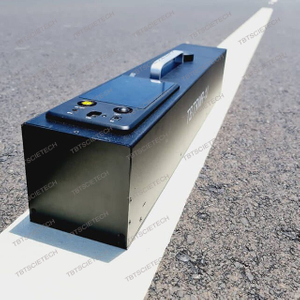
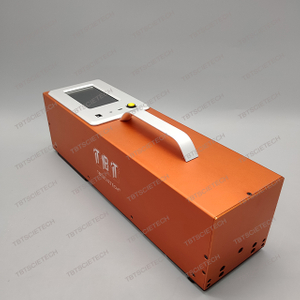
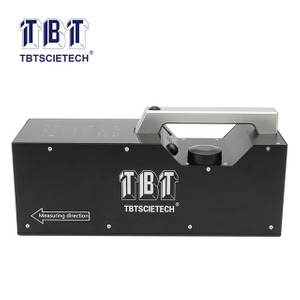
เครื่องวัดระยะสะท้อนการทำเครื่องหมายที่ติดตั้งบนยานพาหนะ TBTRMR-VM ให้การประเมินอย่างต่อเนื่องและมีประสิทธิภาพ และภาพรวมที่สมบูรณ์ของสภาพของเครื่องหมายถนนที่ความเร็วจราจร โดยไม่กีดขวางการจราจร ประสิทธิภาพการตรวจจับสอดคล้องกับการวัดแบบสะท้อนแสงแบบมือถือ
ระบบส่วนใหญ่ประกอบด้วยโฮสต์ ระบบประมวลผลคอมพิวเตอร์ และ DMI (ล้อวัดระยะทาง)
โฮสต์ประกอบด้วยระบบการวัดด้วยแสง ระบบควบคุม ระบบช่วยเหลือผู้ขับขี่ด้วยภาพ ระบบชดเชยความสูง/การเอียง และเสาอากาศระบุตำแหน่งเป่ยโต่ว
คุณสมบัติหลัก:
1. กะทัดรัดและเบา น้ำหนักอย่างรวดเร็ว สำหรับ การติดตั้งและการถอดออก
2. มุมอัตโนมัติ การสอบเทียบ, การตรวจจับอัตโนมัติ ความกว้างของการทำเครื่องหมาย
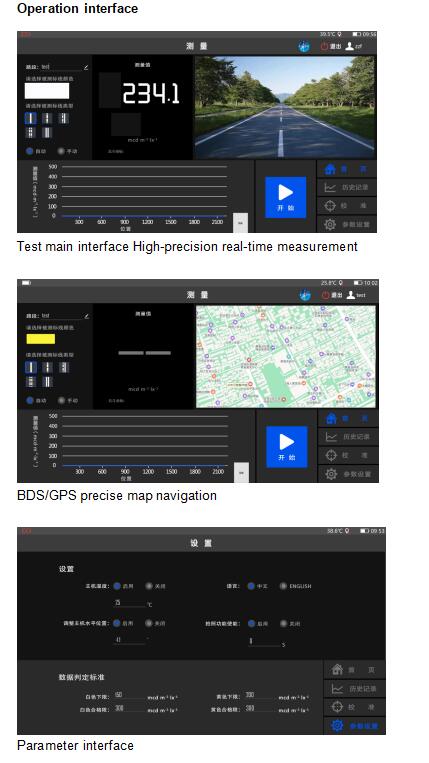
3. การวางตำแหน่งที่มีความแม่นยำสูง ของระบบ Beidou การอัปเดตข้อมูลแผนที่แบบเรียลไทม์
4. การให้ ภาพพาโนรามาของสภาพการตีเส้นจราจร ผู้ใช้สามารถวาดแผนที่การบำรุงรักษาการทำเครื่องหมายได้ และทำเครื่องหมายแผนที่การจัดการทรัพย์สิน ขึ้นอยู่กับการตรวจสอบ ข้อมูล.
5. สามารถทำงานได้ตลอด 24 ชั่วโมงทุกวัน ยกเว้นสภาพอากาศที่รุนแรง เช่น น้ำแข็ง หิมะ และน้ำนิ่ง
6. มาพร้อมพัลเซดเลเซอร์ที่มีความแม่นยำสูง อุปกรณ์ตั้งแต่ (การสแกนเส้นระดับสีเทา 12 บิต กล้อง).
7. ข้อมูลที่รวบรวม โดยแล็ปท็อป
8. พื้นที่จัดเก็บข้อมูลความจุขนาดใหญ่รองรับการขยายและ ข้อมูล การส่งออก
9. แบตเตอรี่ลิเธียมแบบชาร์จไฟความจุสูง รองรับการทำงานต่อเนื่องสำหรับการทดสอบ 300KM อุปกรณ์ยังสามารถเสียบปลั๊กได้ ไปที่ยานพาหนะ ระบบไฟฟ้า
10. ขับไปกลางเลน และพร้อมกัน วัดเส้นคู่ด้วย ค่า RL แต่ละรายการแต่ละรายการ
มาตรฐานที่เกี่ยวข้อง:
มาตรฐาน ASTM E1710(RL)
เครื่องวัดระยะสะท้อนการทำเครื่องหมายที่ติดตั้งบนยานพาหนะ TBTRMR-VM ให้การประเมินอย่างต่อเนื่องและมีประสิทธิภาพ และภาพรวมที่สมบูรณ์ของสภาพของเครื่องหมายถนนที่ความเร็วจราจร โดยไม่กีดขวางการจราจร ประสิทธิภาพการตรวจจับสอดคล้องกับการวัดแบบสะท้อนแสงแบบมือถือ
ระบบส่วนใหญ่ประกอบด้วยโฮสต์ ระบบประมวลผลคอมพิวเตอร์ และ DMI (ล้อวัดระยะทาง)
โฮสต์ประกอบด้วยระบบการวัดด้วยแสง ระบบควบคุม ระบบช่วยเหลือผู้ขับขี่ด้วยภาพ ระบบชดเชยความสูง/การเอียง และเสาอากาศระบุตำแหน่งเป่ยโต่ว
คุณสมบัติหลัก:
1. กะทัดรัดและเบา น้ำหนักอย่างรวดเร็ว สำหรับ การติดตั้งและการถอดออก
2. มุมอัตโนมัติ การสอบเทียบ, การตรวจจับอัตโนมัติ ความกว้างของการทำเครื่องหมาย
3. การวางตำแหน่งที่มีความแม่นยำสูง ของระบบ Beidou การอัปเดตข้อมูลแผนที่แบบเรียลไทม์
4. การให้ ภาพพาโนรามาของสภาพการตีเส้นจราจร ผู้ใช้สามารถวาดแผนที่การบำรุงรักษาการทำเครื่องหมายได้ และทำเครื่องหมายแผนที่การจัดการทรัพย์สิน ขึ้นอยู่กับการตรวจสอบ ข้อมูล.
5. สามารถทำงานได้ตลอด 24 ชั่วโมงทุกวัน ยกเว้นสภาพอากาศที่รุนแรง เช่น น้ำแข็ง หิมะ และน้ำนิ่ง
6. มาพร้อมพัลเซดเลเซอร์ที่มีความแม่นยำสูง อุปกรณ์ตั้งแต่ (การสแกนเส้นระดับสีเทา 12 บิต กล้อง).
7. ข้อมูลที่รวบรวม โดยแล็ปท็อป
8. พื้นที่จัดเก็บข้อมูลความจุขนาดใหญ่รองรับการขยายและ ข้อมูล การส่งออก
9. แบตเตอรี่ลิเธียมแบบชาร์จไฟความจุสูง รองรับการทำงานต่อเนื่องสำหรับการทดสอบ 300KM อุปกรณ์ยังสามารถเสียบปลั๊กได้ ไปที่ยานพาหนะ ระบบไฟฟ้า
10. ขับไปกลางเลน และพร้อมกัน วัดเส้นคู่ด้วย ค่า RL แต่ละรายการแต่ละรายการ
มาตรฐานที่เกี่ยวข้อง:
มาตรฐาน ASTM E1710(RL)